
Epsilon
Evolution of solid-propellant rockets
The Epsilon rocket is a solid rocket designed to make the field of space,previously something out of reach for most, accessible to people everywhere. Driving efficiency of assembly and inspection, the project is aiming for a world-first in terms of compact launches, with reforms made across the board to the operations, equipment, and craft launch systems. In addition to changes to reduce vibration and sound, damping the impact from the satellite separating from the rocket has allowed us to achieve the smoothest ride in the world. We have thus far launched four versions of the Epsilon Launch Vehicle from the Uchinoura Space Center, with all of these successful.
Test flight initiatives
The Epsilon Launch Vehicle test flight drew on the existing rocket technologies used in the H-IIA and M-V in order to develop a rocket fuselage at low cost and in a short time.
Development of the test flight involved revamping launch control operations and implementing a mobile control system to improve the way rocket launch operations and equipment are utilized.
We sought to take existing rocket launch control operations and make them simpler and more streamlined. The M-V required approximately 80 personnel engaged in a launch, but the Epsilon streamlines this to allow eight people to successfully launch a rocket. This has been achieved thanks to new technologies such as automatic inspection routines.
The computers used for control tended to be large, special-order components. With the Epsilon, we have streamlined these to a small formfactor that makes them mobile, switching to a compact system. We refer to this system as “mobile control.”
In this way, we have revamped the underlying system used to launch experimental rockets.


Test flight to enhanced Epsilon
After succeeding with a launch of the test flight, we pursued further advancements to optimize fuselage performance. We refer to this as “enhanced development.”
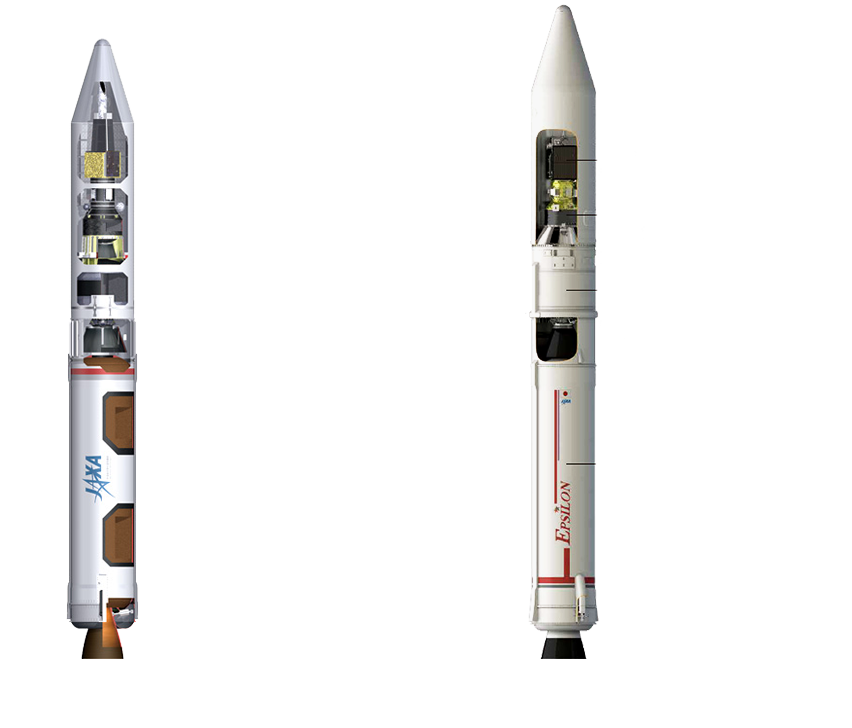
One of the main goals of enhanced development is improving launch performance and increasing the size of mountable satellites. The test flight used a second stage motor within the fairing; this was made larger and moved out of the fairing to allow for a 1.4-fold increase in propellant (fuel). This change to housing only the satellite and third stage within the fairing has allowed for mounting satellites of a larger size. We have also pursued ways of streamlining the weight used in the rocket structure and electronic components.
Improvements to second stage fuselage
Higher performance
After decommissioning the M-V, we have continued researching solid rocket motors and further advanced the technology. Seeking to achieve more efficient motors through enhanced development, we undertook improvements to the insulation and fuselage structure used.
Solid rockets are operated by combustion of propellant within the fuselage, so the interior is lined with insulation to protect it. What was formerly a multi-tier system has now been streamlined to a single layer of this insulation material. Carbon fiber is used in the fuselage, and we revamped the orientation of the fiber lamination. These improvements allow for greater streamlining of the fuselage and reducing manufacturing costs.

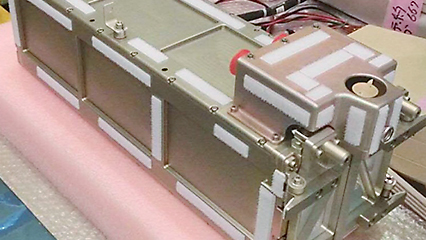
Enhanced Epsilon Launch Vehicle second stage motor
A view of a terrestrial vacuum combustion test
Larger formfactor
The fuselage for the test flight’s second stage employed the third stage fuselage of the M-V, housed within the satellite fairing at a 2.2m diameter.
After enhanced development, we extended the diameter to 2.6m and moved the stage out of the fairing to create a system offering a 1.4-fold increase in the amount of propellant that can be housed in the second stage.
This has allowed us to achieve better launch capacity and performance.

comparison of test flight and enhanced Epsilon
Electronic improvements
In addition, we streamlined and made smaller the power sequence divider (PSDB) used in the second and third stage fuselage in order to increase launch performance. We also switched the rocket from using mechanical relays to semiconductor-driven relays, which allowed for nearly halving weight per PSDB from 20kg to 12.5kg.

Structural improvements
Structural streamlining and simplification
Improvements we have made include migrating from a structure involving multiple components to an integrated, unified design, as well as streamlining and shortening the overall length to reduce manufacturing costs.
Optimizing overall fairing length
The test flight required covering the second stage fuselage and satellite with a fairing, but through enhanced development, we succeeded in moving the second stage fuselage outside of the fairing, with the length of the fairing made slightly shorter based on real-world demands for use of satellites.
Mitigating the impact on satellites
When a satellite separates from a rocket, it involves instantly releasing the bolts on the bands holding it in place using explosives. This caused a considerable impact to the satellite. Starting with Epsilon-3, we employed a low impact satellite separation mechanism that allows for mechanically disconnecting the bands with no explosives and gently releasing energy so as to minimize the impact to the satellite as it is released.


Separation test of low impact satellite separation mechanism
Improved propulsion systems
Epsilon-3 features a small format liquid propulsion system (PBS: post-boost-stage) installed on top of the third stage motors. While insertion into orbit of satellites with complex fidelity requirements can be difficult with solid rockets, use of a PBS allows for granular control, improving the fidelity of the orbit insertion. PBS makes maximal use of technology used in the H-IIA Launch Vehicle and is highly reliable. The test flight employed the same functionality; through enhanced development, we achieved a way to utilize PBS in a more simple system that increases reliability. Epsilon 3 is the first in the Epsilon line to allow for placing a satellite into a sun-synchronous sub-recurrent orbit.

Going beyond enhanced development
Using the enhanced development solutions gained through Epsilon-2, 3 and 4 was developed to allow for the simultaneous launch of multiple satellites and the accurate orbital insertion of these. This solutions allow for using the Epsilon Launch Vehicle in the competitive global satellite launch field, where there is expected to be growing international demand for the launch of small, ultra small, and CubeSat formfactor satellites. It also enjoys synergy with the H3 Launch Vehicle currently underway, and we expect these technologies to be put to effective use in further shoring up Japan’s competitiveness in the international scene.
Multi-satellite mounting system
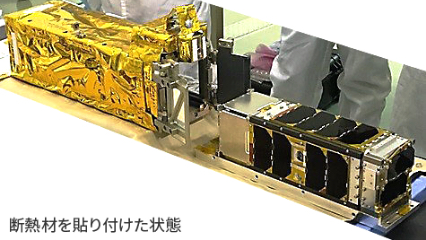
Epsilon-4 involves a launch consisting of seven satellites (Innovative Satellite Technology Demonstration Unit 1*), so we developed a new multi-satellite mounting system (ESMS) and CubeSat release mechanism (E-SSOD). Here we discuss the particulars of each part in development.
*The Innovative Satellite Technology Demonstration Unit 1 consists of seven satellites, one being the Rapid Innovative Payload Demonstration Satellite 1 (RAPIS-1), developed through JAXA in conjunction with startups and targeting seven demonstration tests, as well as six other ultra small formfactor CubeSats. This is the first attempt to provide a space launch testing program under the Innovative Satellite Technology Demonstration Program.
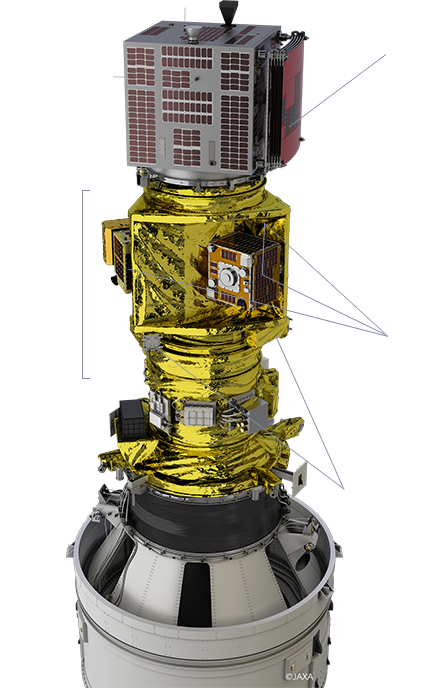
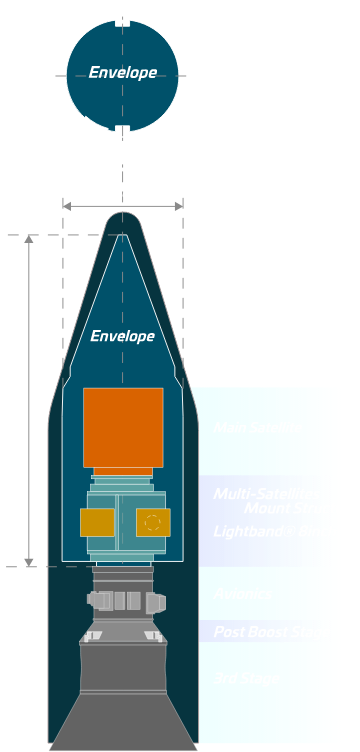
Multi-satellite mounting structure (ESMS)
The multi-satellite mounting system is installed atop the PBS, with a 200kg-class satellite at the topmost point, and three ultra small formfactor 60kg-class satellites at approximately the midpoint in 120-degree increments. There are two CubeSat release mechanisms on the bottom, with CubeSats installed within. When releasing satellites into orbit, the rocket orbit and orientation are calibrated so as to allow the satellites to be separated one after another and not collide with the rocket upon release.

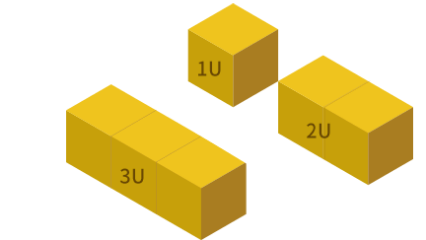
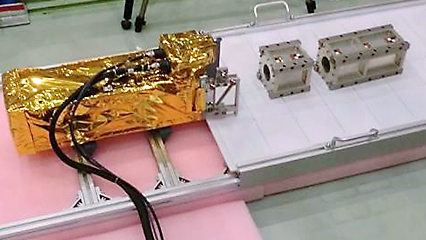
CubeSat release unit(E-SSOD)
Using the J-SSOD, which has already been used at the International Space Station, we developed a system that allows for mounting up to three 1U type CubeSats, with two of these systems installed below the multi-satellite mounting system. Signals sent from the rocket are used to open the satellite lock door and release the CubeSat.
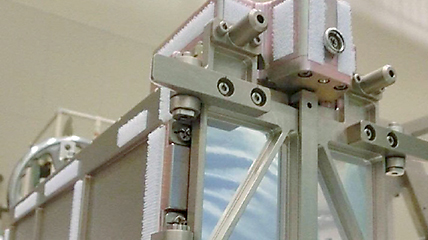
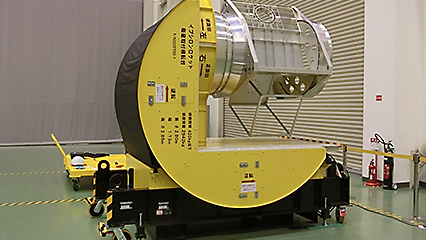
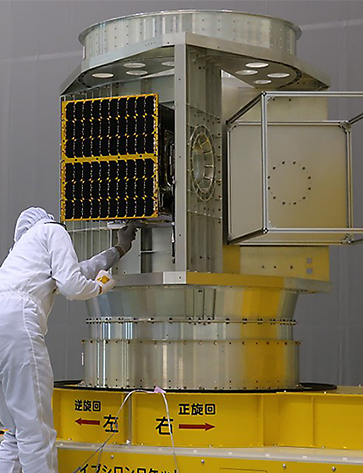
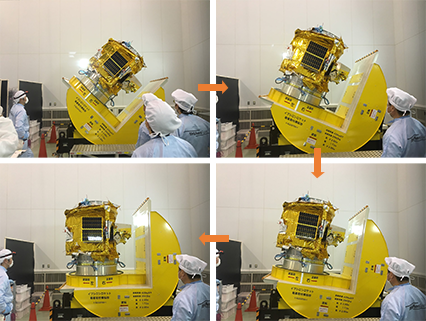
The yellow device on which the multi-satellite mounting system is installed is referred to as the Epsilon Launch Vehicle satellite mounting rolling platform. It was newly developed alongside Epsilon-4 for use when attaching ultra small formfactor or other satellites to the multi-satellite mounting system.
This device allows for freely tilting the mechanism at any range within 90 degrees, as well as rotating the platform on which the multi-satellite mounting system is directly installed in 360 degrees of motion. In this way, we are shoring up our terrestrial facilities and equipment in line with the overall mission.
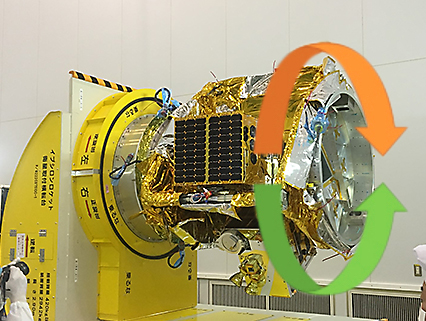
Can rotate in either direction
Epsilon S Launch Vehicle Project
The satellite launch market, both at home and abroad, is now growing in demand of various satellites such as small- and micro-satellites, and CubeSats as technology progresses toward miniaturization and integration. To respond to this demand, JAXA started a new project, Epsilon S Launch Vehicle Project, in March, 2020. The project is aimed at expanding Japan’s industry base in space transportation by transferring the Epsilon Launch Vehicle to the private sector and promoting the growth of the independent and sustainable space transportation.
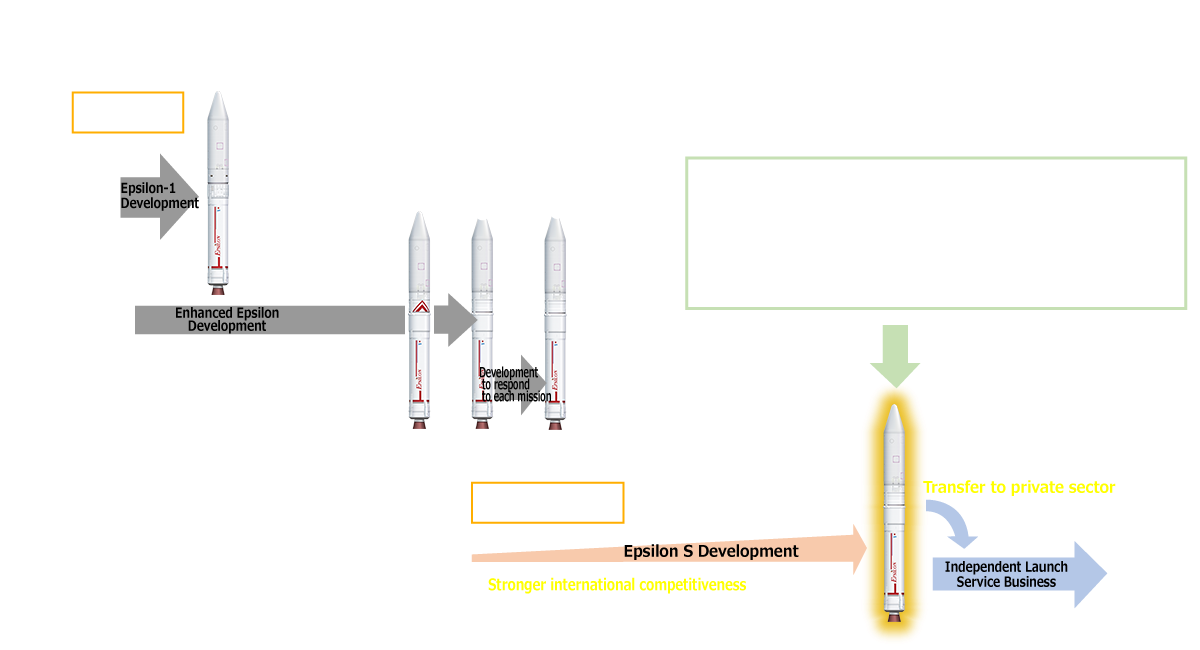
Let’s see the details of changes from Enhanced Epsilons launched in the second to the forth flight.
①Change of the name
The new Epsilon is named "Epsilon S" with the intention to Strengthening its international competitiveness through the Synergy effects with H3. "S" in the Epsilon S means the following:
- Synergy with H3
- Speed of response
- Smart in performance
- Superior in competitiveness
- Service of launch
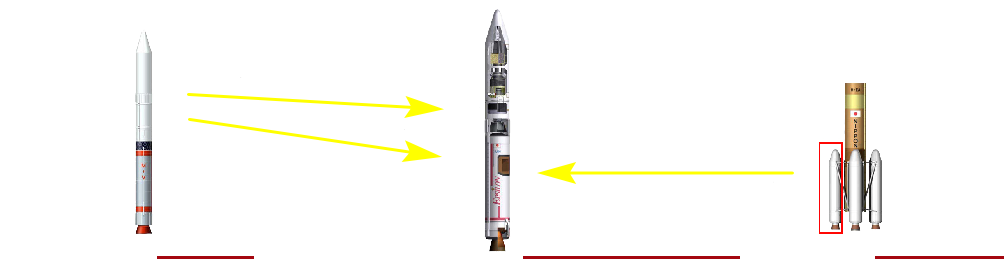
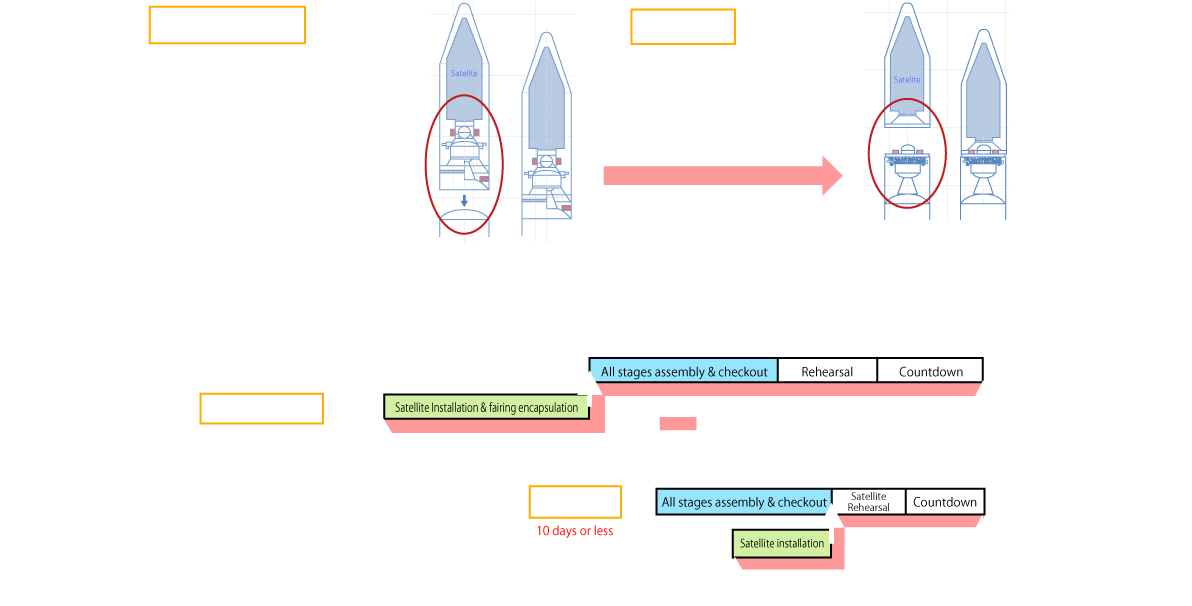
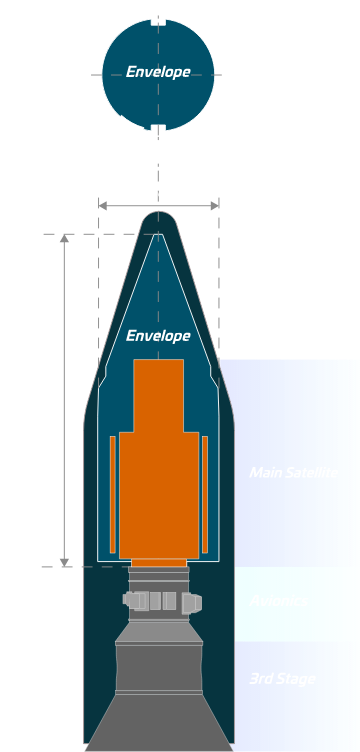
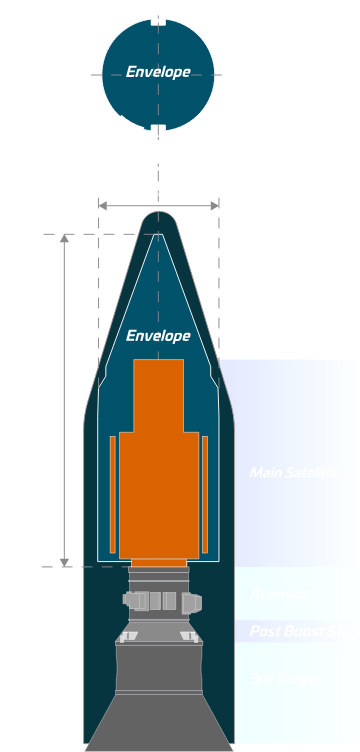
②Fairing capsulation
The current Enhanced Epsilon has a satellite, or satellites, and the third stage inside the fairing. Therefore, checkout on fairing connection and all stages must be conducted after the encapsulation of the satellite(s), resulting in about one month needed from satellite receipt to launch. The Epsilon S has only a satellite, or satellites, in the fairing with the third stage being exposed. This configuration allows us to conduct checkout on all stages before the encapsulation of the satellite(s). In addition, the way to connect the fairing with the rocket is changed from connecting a half shell of the fairing one-by-one to connecting both of the shells all together. These changes are aimed at drastically reducing the duration between satellite receipt to launch to 10 days or less, leading to short-time satellite preparation at the launch site which is highly beneficial to satellites.
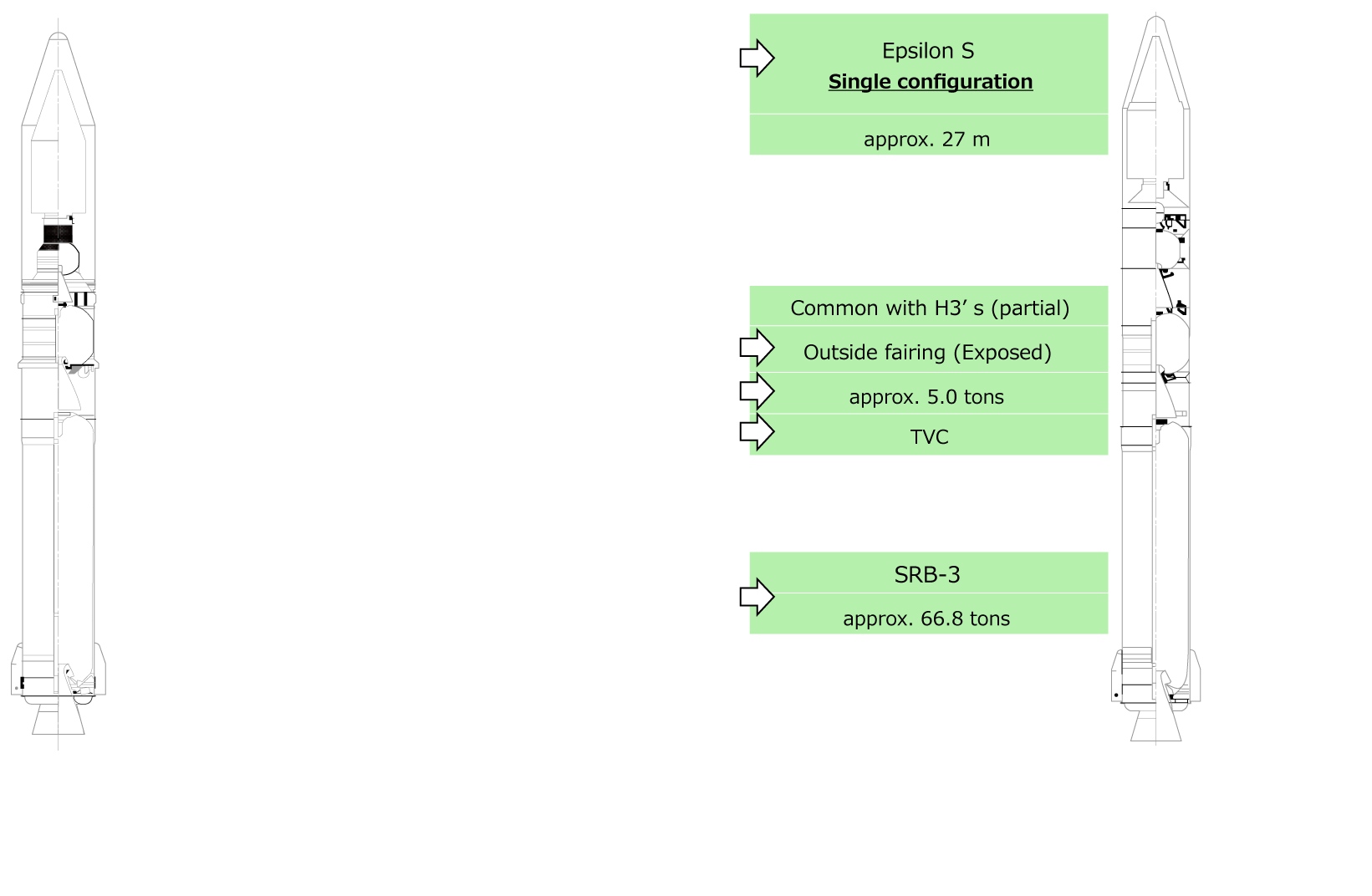
③3rd stage motor
The Enhanced Epsilon adopts the spin stabilization method to the attitude control of the 3rd stage motor in order to simplify and lighten the rocket structure. On the other hand, the Epsilon S introduces TVC (Thrust Vector Control) to the three-axis attitude control, aiming to further mitigate the environment for satellites. Its enlarged 3rd stage motor optimizes the propellant mass ratio to the whole rocket mass to greatly improve the launch capability.
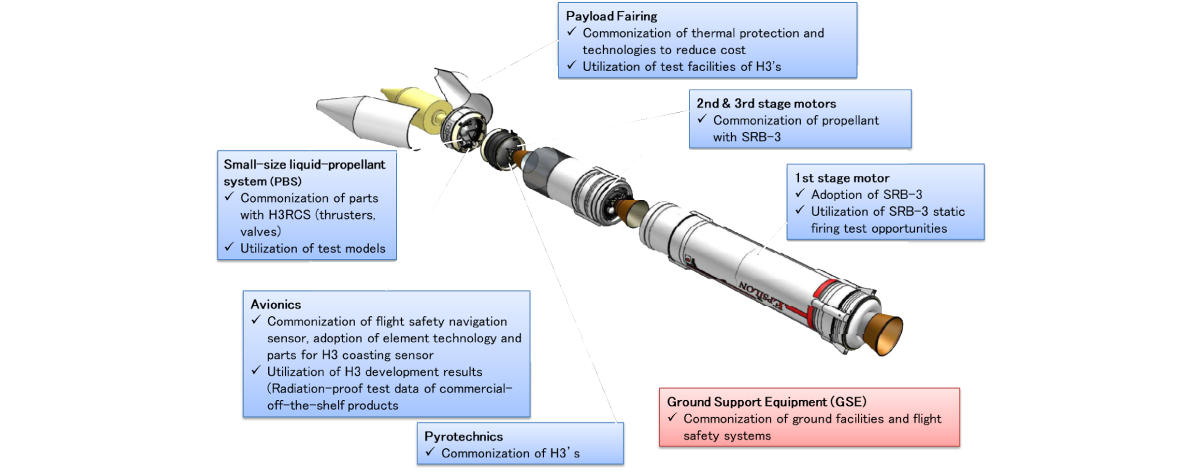
④1st stage motor
While the Enhanced Epsilon uses an SRB-A of the H-IIA/B as the 1st stage motor, the Epsilon S employs an SRB-3 of the H3, which is now under development. The SRB-3 for the H3 has a fixed nozzle with no function of the thrust vector control. Since the Epsilon S needs to control its attitude during 1st stage combustion, its SRB-3 has a movable nozzle with a function of TVC (Thrust Vector Control).
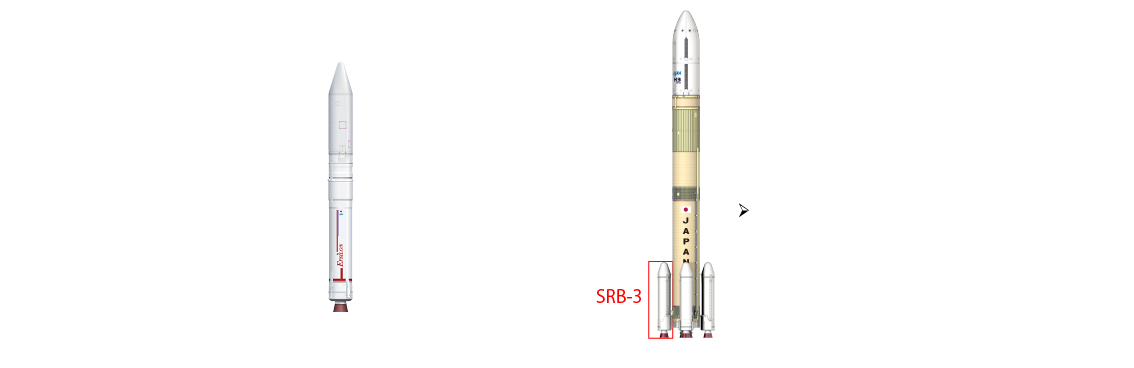
The Epsilon S increases efficiency through commonization of technologies and parts with H3.
The first flight of the Epsilon S will be launched in FY2023.
Loaded on the Epsilon Launch Vehicle
Epsilon rocket configuration
The Epsilon Launch Vehicle can be tailored to a range of launch needs, from its basic formfactor to multi-launches using optional formfactors, and a variety of other configurations.
Option form
Multi launch
Option form
Single launch
Option form
Single launch
Launch Schedule


©Japan Aerospace Exploration Agency