
イプシロンロケット
伝統を受け継ぎ、革新を続ける
イプシロンロケットはこれまで「特別」だった宇宙の敷居を下げ、誰もが積極的に宇宙を使える時代の実現を目指した固体ロケットです。 組立・点検などの運⽤を効率化し、「世界一コンパクトな打ち上げ」という掛け声のもと、運用・設備・機体の打ち上げシステム全体の改革に取り組みました。 また、振動と音を小さくする工夫に加えて、ロケットから衛星が分離されるときの衝撃を抑える工夫をすることで、世界トップレベルの乗り心地を実現しました。 鹿児島県肝付町にある内之浦宇宙空間観測所から打ち上げられます。
試験機の取り組み
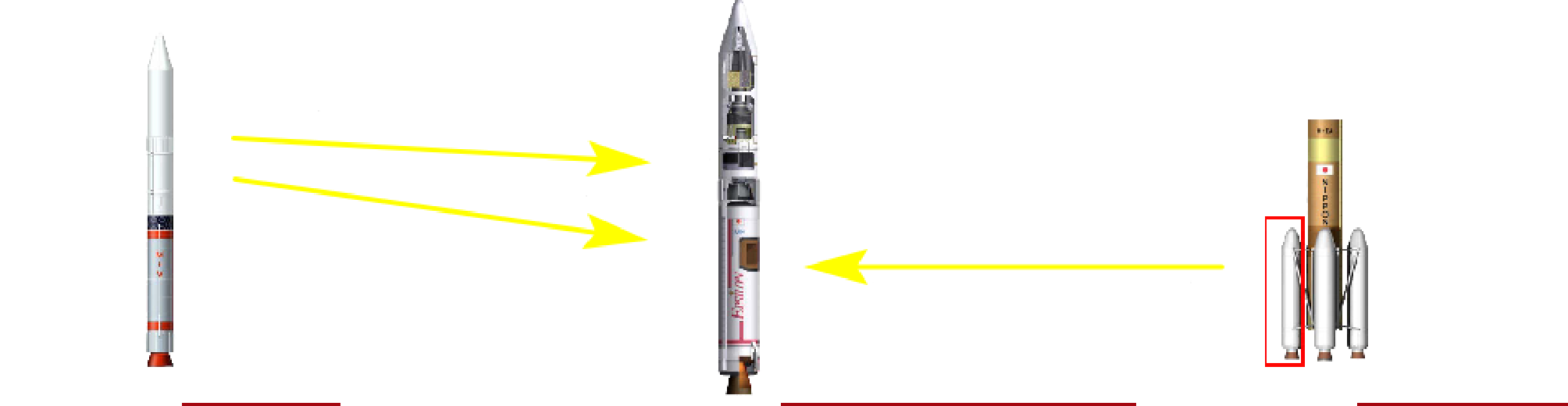
イプシロンロケット試験機はH-IIAやM-Vという既存のロケット技術を継承することで短期間・低コストなロケット機体を開発しました。
また、試験機開発では発射管制オペレーションの見直しや、モバイル管制の導入などにより、ロケットを打ち上げる仕組みの中で「運用・設備」の改革を実現しました。
発射管制オペレーションの見直しでは、ロケットの打ち上げ管制をできるだけシンプルにすることに取り組みました。 先代のM-Vでは打ち上げ時に約80人が管制室に詰めて作業をおこなっていましたが、イプシロンでは、オペレータ8人で打ち上げることができるようになりました。 これは自動点検等の新しい技術に支えられて達成したものです。
管制に必要な計算機も、これまでは特注の大きなものを使っていましたが、イプシロンでは移動可能なほど小型化し、コンパクトなシステムに切り替えました。このシステムを「モバイル管制」と呼んでいます。
このように試験機開発ではロケットを打ち上げる仕組みそのものを革新しました。


試験機から強化型へ
試験機の打ち上げを成功させた後に、機体性能の最適化を図るために更なる改良開発に取り組みました。これを強化型開発と言います。
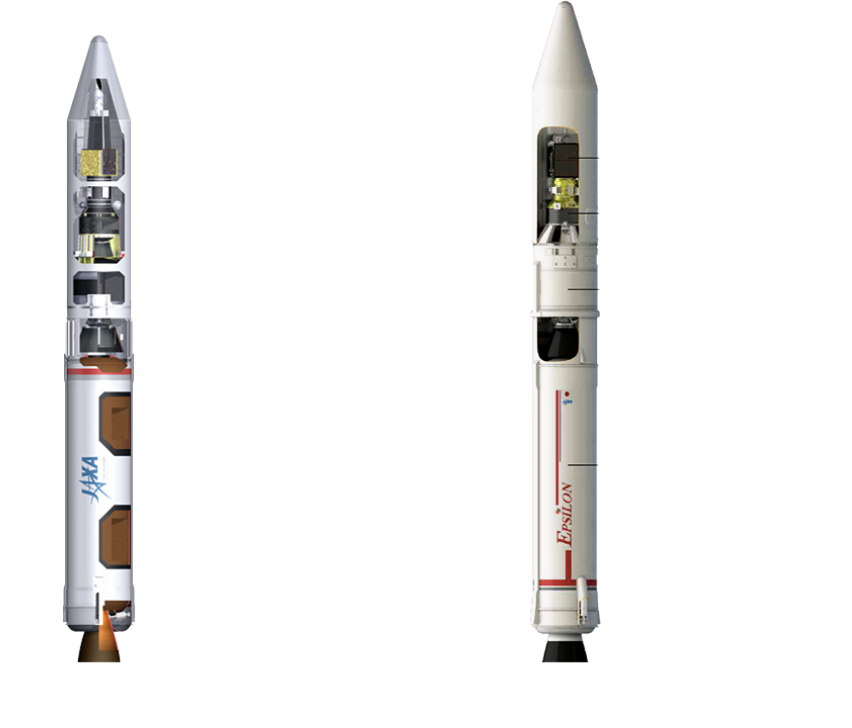
強化型開発の大きな目的は「打ち上げ能力の向上」と「搭載可能な衛星サイズの拡大」です。 試験機ではフェアリングの中に覆われていた2段モータを大型化してフェアリングの外に出すことによって推進薬(燃料)を約1.4倍に増加させることが可能となりました。 また、フェアリング内部に衛星と3段のみを格納することで、より大きな衛星が搭載できるようになります。更にロケット構造や電子機器の軽量化を図っています。
2段機体の改良
高性能化
M-Vの引退後も固体ロケットモータの研究を継続的に行い、技術を進歩させてきました。強化型の開発では、より効率の良いモータにするべく、耐熱材と機体構造の改良に取り組みました。
固体ロケットは機体の中で火薬が燃えることになるため、機体を傷めないよう内部に耐熱材を施しています。 これまで複数の層だった、この耐熱材を単層にしました。また機体には炭素繊維を用いていますが、繊維の積層方向を見直しました。 これらの改良により機体の軽量化及び製造コストの低減につながりました。

強化型イプシロンロケット2段モータ
真空地上燃焼試験の様子
大型化
試験機の2段機体はM-Vの3段機体を活用したもので、直径約2.2m、衛星フェアリングの中に収納されていました。
強化型開発では直径を約2.6mに拡大し、フェアリングの外に出すことによって、2段に搭載できる推進薬(燃料)量を約1.4倍(約10.7t→約15t)に増加させることが可能となりました。
これにより、打ち上げ能力が向上しました。

試験機と強化型の2段の比較
電子機器の改良
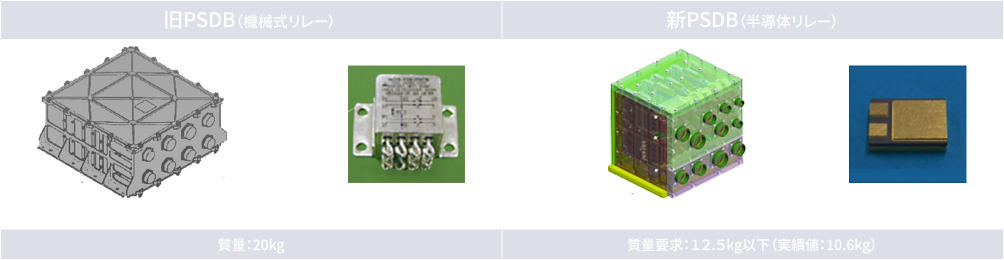
打ち上げ能力向上のために、2段機体と3段機体に搭載される電力シーケンス分配器(PSDB)の小型化・軽量化を行います。 ロケットではこれまで機械式リレーを用いていたものを半導体リレーに変えることで、PSDB一基あたりの重量を20kgから12.5kg以下へと約半減することに成功しました。
構造の改良
構造の簡素化・軽量化
M-Vの引退後も固体ロケットモータの研究を継続的に行い、技術を進歩させてきました。 強化型の開発では、より効率の良いモータにするべく、耐熱材と機体構造の改良に取り組みました。
フェアリング全長の最適化
M-試験機では2段機体から衛星までをフェアリングで覆う必要があったものを、強化型開発では2段機体をフェアリングの外に出すことができるようになったため、それに応じてフェアリングの全長も衛星需要を踏まえて少し短くしています。
衛星が受ける衝撃の緩和
ロケットから衛星を分離する際、これまでは固定しているバンドのボルトを爆薬で瞬時に切断する方法が取られていたため、非常に大きな衝撃が発生していました。 3号機から「低衝撃型衛星分離機構」を採用し、爆薬を使わず機械的にバンドの結合を外すことで、エネルギーをゆっくり開放し、衛星が放出される際の衝撃を小さく抑えます。


低衝撃型衛星分離機構の分離試験
液体推進系の改良
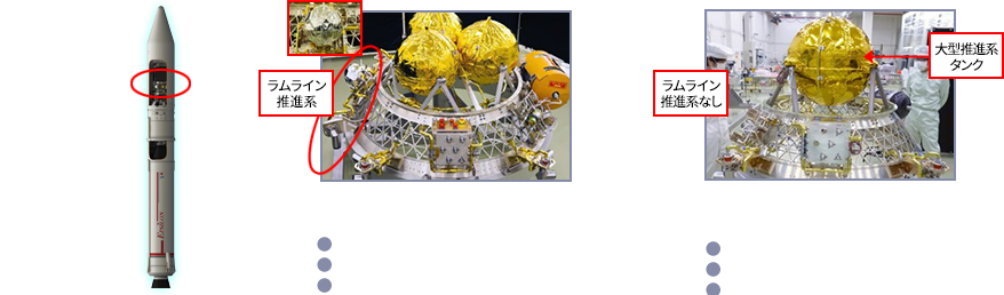
3号機では3段モータの上に小型の液体推進システム(PBS:Post-Boost-Stage)を搭載しました。 固体ロケットでは難しい精度の高い軌道投入もPBSを付与することで繊細な制御が可能となり、軌道投入精度を高めることができます。 PBSは、H-IIAロケットにも使われている技術を最大限活用しており、高い信頼性を持っています。 試験機にも同様の機能が搭載されていましたが、強化型開発におけるPBSではよりシンプルなシステムにすることで信頼性を更に向上させています。 3号機ではイプシロンとしては初の太陽同期準回帰軌道への衛星投入を達成しました。
複数衛星搭載システム
4号機では、1機のロケットに複数の衛星を同時に搭載し打ち上げ、衛星毎に正確に軌道投入する技術を確立しました。 この技術により、世界的に需要の拡大が見込まれる小型衛星/超小型衛星/キューブサットの打上げ市場でイプシロンロケットの国際競争力を発揮することを目指しています。 また、現在取り組んでいるH3ロケットとのシナジー効果を発揮して国際競争力を更に強化する開発においてもこれら技術を効果的に活かしていく予定です。
強化型開発のその先へ
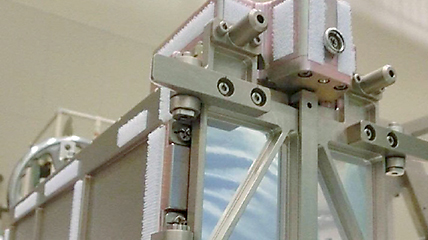
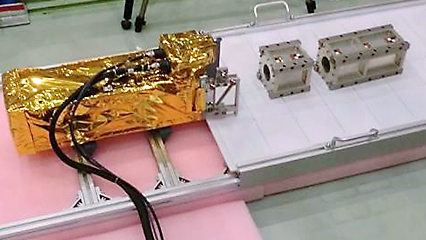
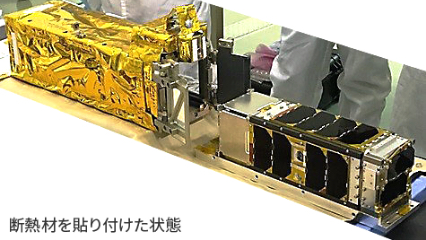
複数の衛星搭載を実現するために、新たに複数衛星搭載構造(ESMS)やキューブサット放出装置(E-SSOD)を開発しました。 それぞれの開発品を紹介します。
複数衛星搭載構造(ESMS)
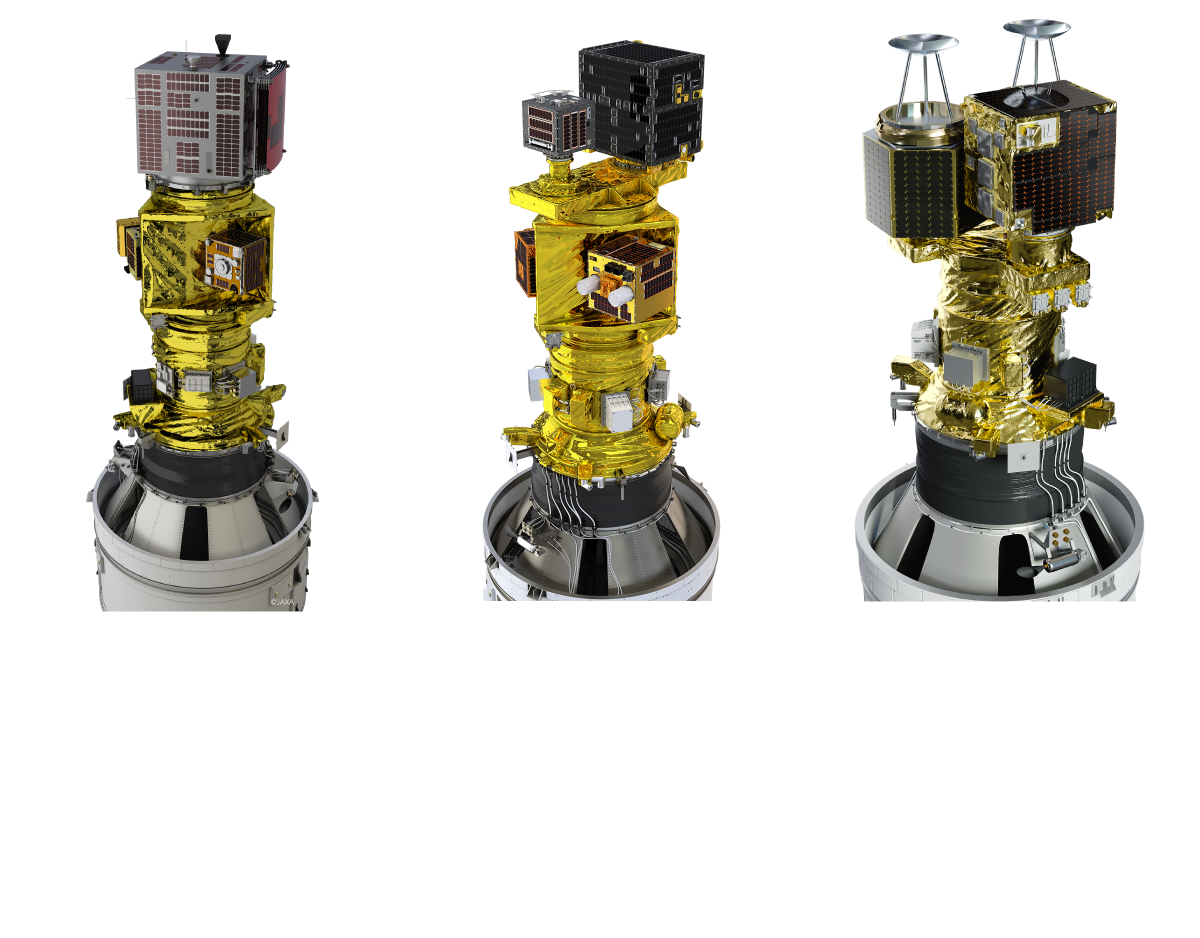
100~200kg級の衛星を最上部に、50kg級の衛星は中ほどに、下部には10cm四方のキューブサットを搭載するためのキューブサット放出機構が取り付けられます。 軌道に衛星を放出する際は、ロケットの軌道と姿勢を変えて、放出後の衛星にロケットがぶつからないように順番に分離します。
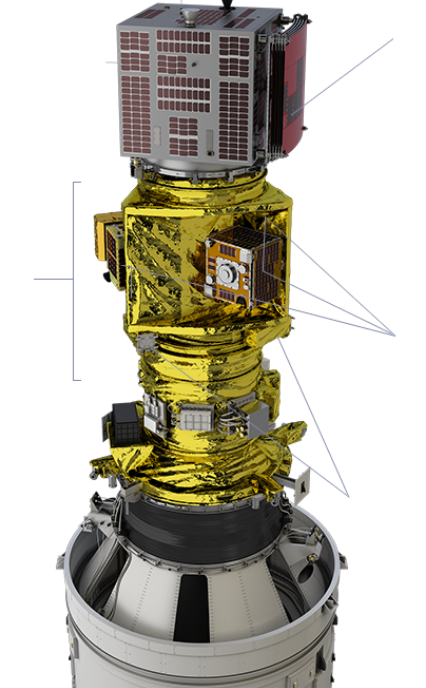
革新的衛星技術実証1号機
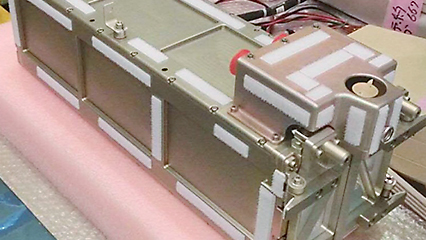
キューブサット放出装置(E-SSOD)
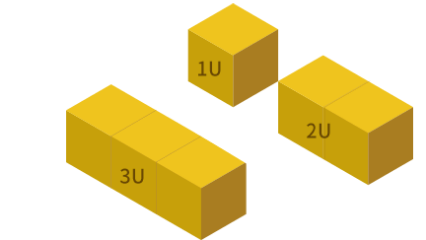
国際宇宙ステーションで利用実績のある放出機構「J-SSOD」をもとに、1Uタイプキューブサットを最大3機搭載可能な機構として開発し、複数衛星搭載構造の下部に2式取り付けられます。 ロケットからの信号により衛星ロックドアを開放し、キューブサットを放出します。
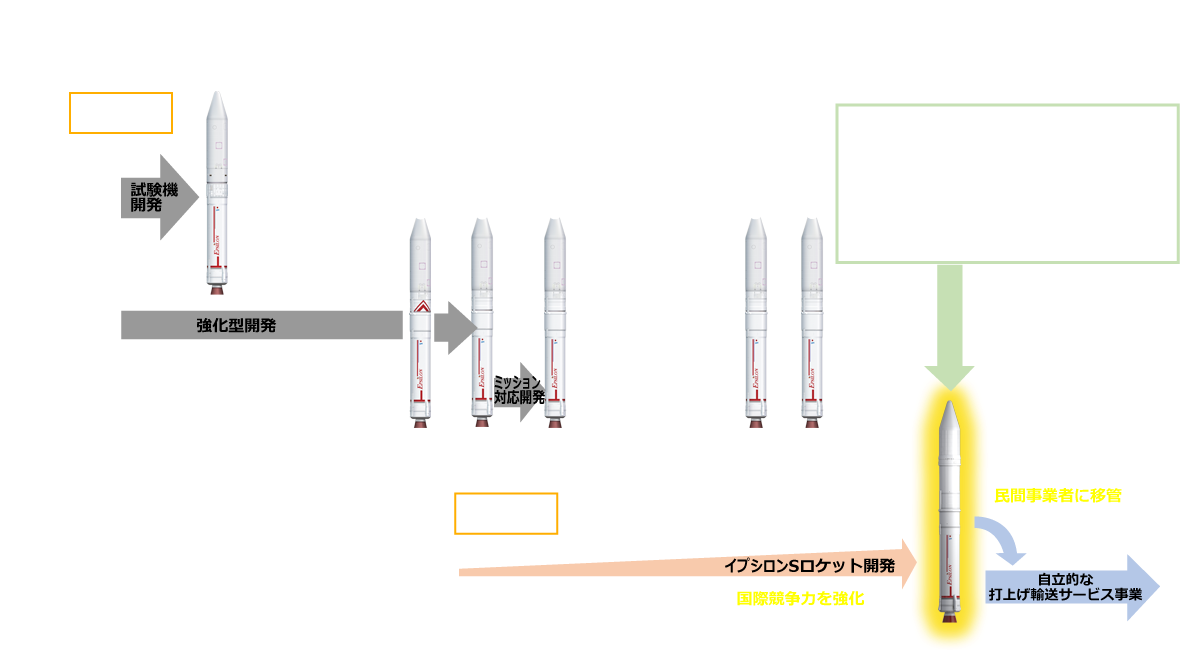
イプシロンSロケットプロジェクト
近年、人工衛星の打上げ市場は、小型化・集積化の技術進展により小型衛星、超小型衛星、キューブサットといった多様な衛星の打上げ需要が国内問わず海外でも高まりを見せています。 こうした需要に対応するために2020年3月、新たに「イプシロンSロケットプロジェクト」を発足しました。 イプシロンSロケットプロジェクトでは、イプシロンロケットの民間移管を実現し、自立的かつ持続可能な輸送システムに育て上げることで、日本の宇宙輸送における産業規模の拡大を目指します。
イプシロンロケット強化型からの変更点を詳しく見ていきましょう。
①名称の変更
イプシロンSロケットと「S」が付きました。 その背景にはH3ロケットとのシナジー効果を発揮して国際競争力を強化するという思いが込められています。 他にも以下の通り、様々な意味を持ち合わせています。
- Synergy (シナジー)
- Speed (即応性)
- Smart (高性能)
- Superior (競争力)
- Service (打上げ輸送サービス)
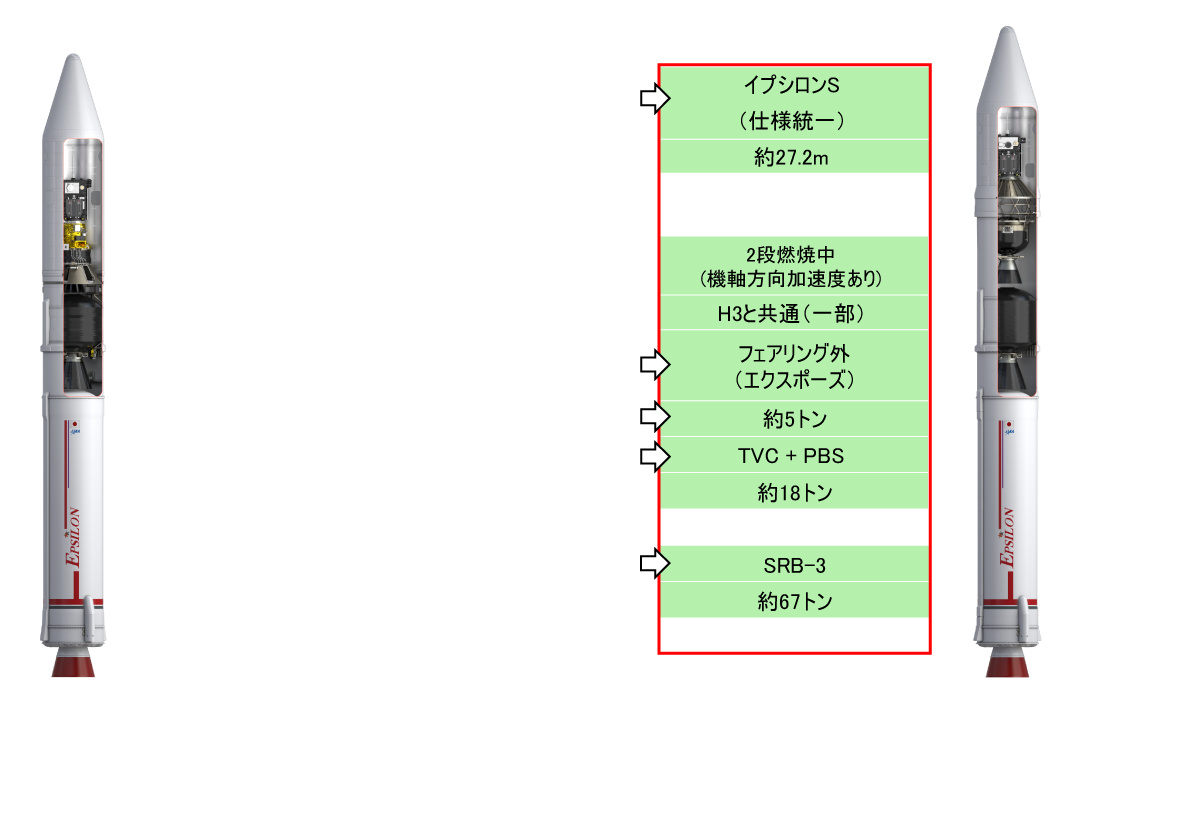
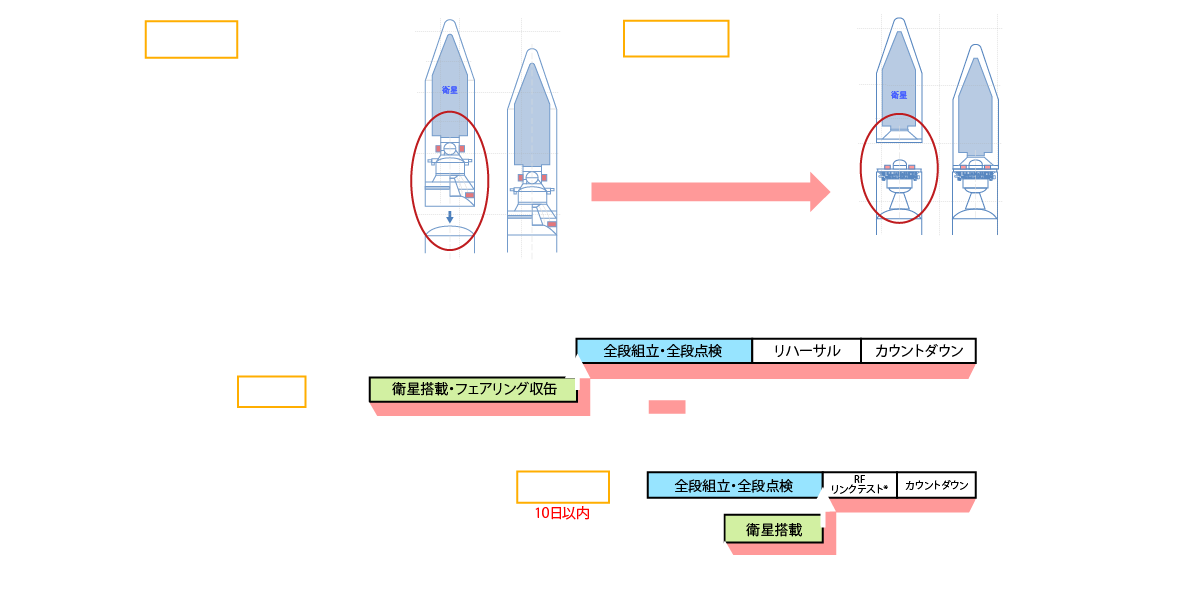
②フェアリングのカプセル化
これまでの強化型イプシロンロケットではフェアリングの中に衛星と3段が搭載されているため、衛星搭載後にフェアリング結合とロケット全段点検を行う必要があり、 衛星を受領してから打ち上げまでに約1か月かかっていました。イプシロンSロケットでは3段をフェアリングの外に配置し、フェアリングの中には衛星だけを搭載する形態とすることで、 衛星を搭載する前にロケット単独で全段点検をおこなうことが可能になりました。また、 これまではフェアリングを半殻ずつとしていたところ、全殻一体で結合できるすることで、フェアリング結合の作業期間を短縮します。 これらにより衛星受領から打ち上げまでの期間を10日以内と大幅に短縮することを目指しています。これは衛星の射場作業期間の短縮につながり、衛星にとっても大きなメリットです。
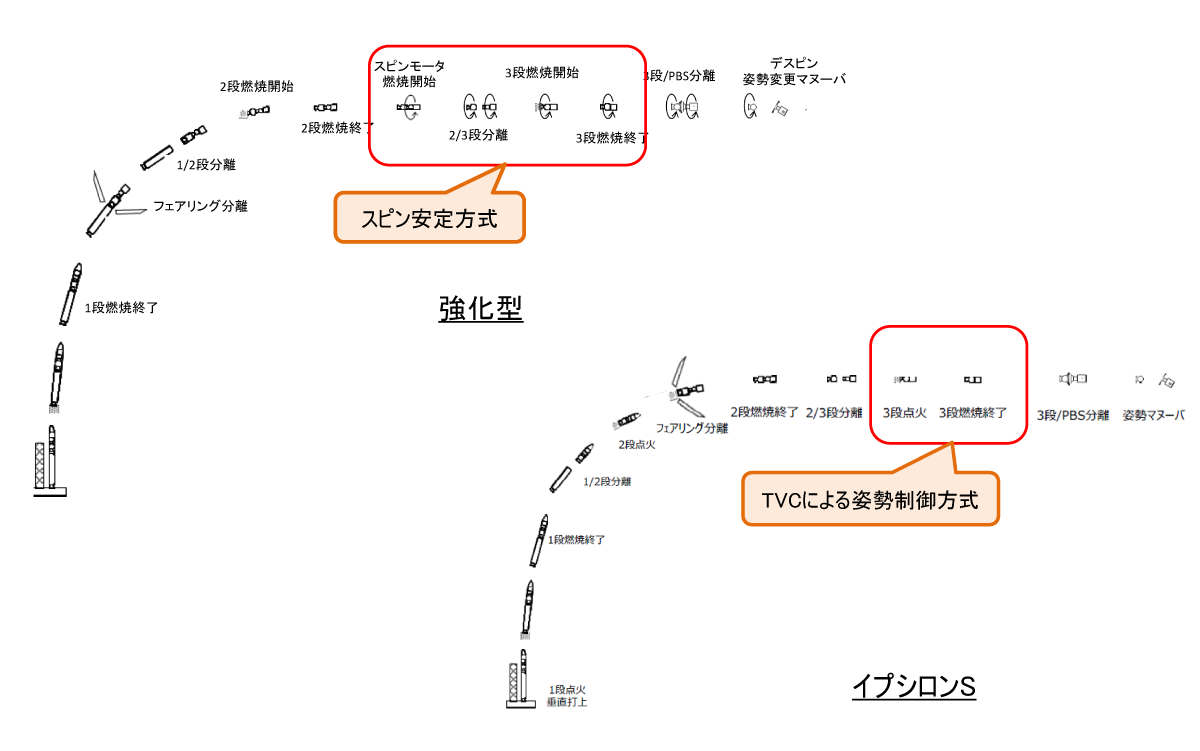
③3段モータ
強化型イプシロンロケットでは機体構成をシンプルかつ軽量化するために、3段モータの姿勢制御はスピン安定方式を採用しています。 一方、イプシロンSロケットでは、TVC(Thrust Vector Control:推力方向制御機能)を導入し「3軸姿勢制御」を採用することで、衛星に対する環境条件をさらに緩和させることを目指しています。 また、3段モータを大型化することで、推進薬量をロケット全体として最適な質量バランスになるように設定、打上げ能力の向上を目指します。
④1段モータ
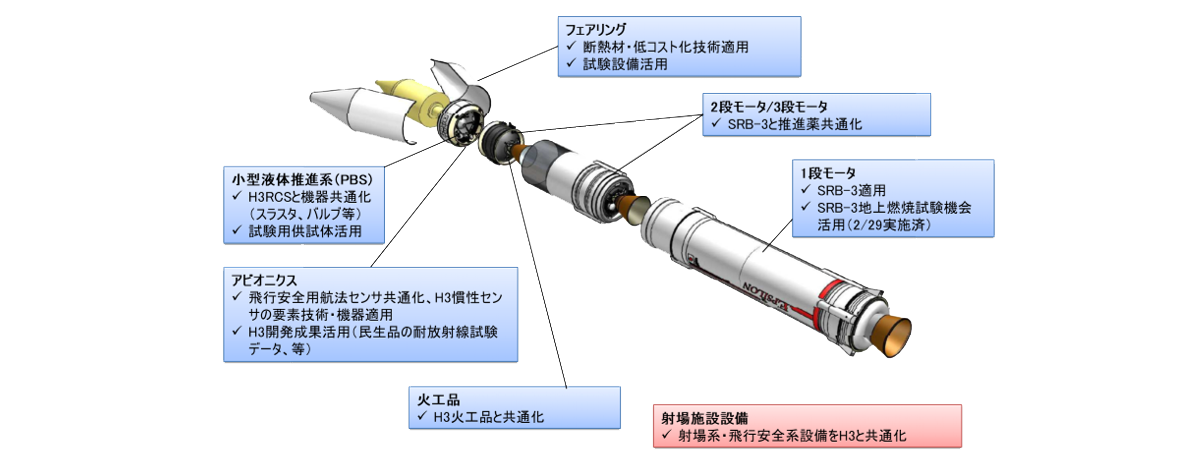
強化型イプシロンロケットの1段モータにはH-IIA/BロケットのSRB-Aを使用していますが、イプシロンSロケットでは現在開発中のH3ロケットのSRB-3を使用します。 H3ロケットのSRB-3は固定ノズルで推力の方向を制御する機能がありませんが、イプシロンSロケットでは可動ノズルの方向を制御して1段燃焼中の姿勢制御を行うため、 SRB-3に推力方向制御機能(TVC:Thrust Vector Control)を付加したものを1段モータとして使用します。
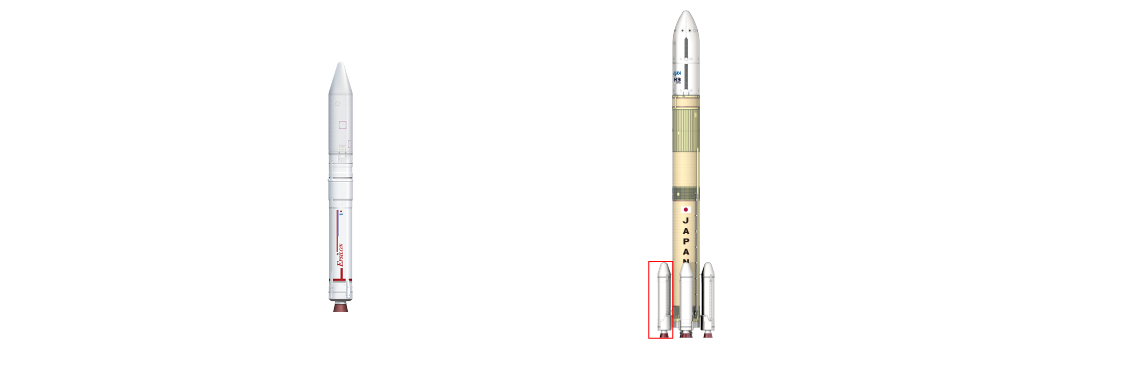
他にもH3ロケットと技術や部品などを共通化して開発の効率化を図っています。


©Japan Aerospace Exploration Agency